自动泊车系统使用说明
进入自动泊车系统
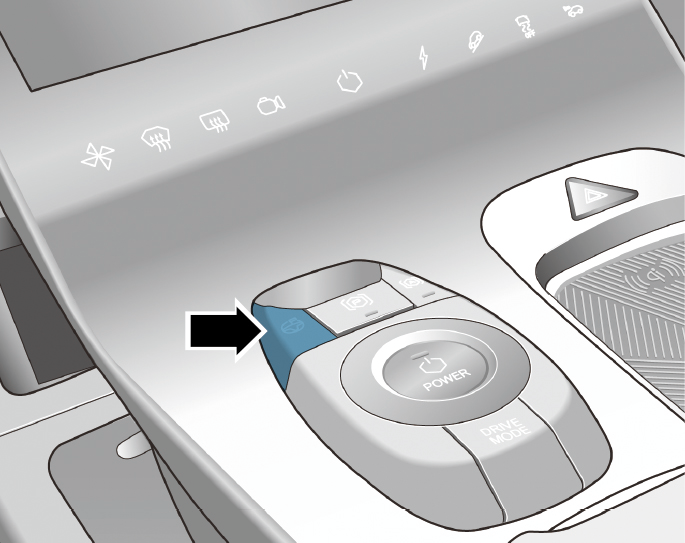
车辆电源模式置于“READY”挡时,按下自动泊车开关,即可进入自动泊车系统。
车位搜索
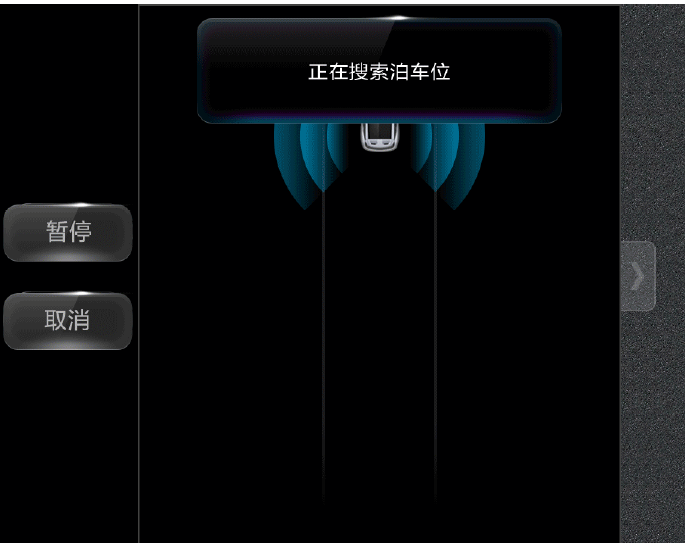
打开自动泊车功能后,可低速向前行驶,以搜索可用的车位信息。
泊车方式及车位选择
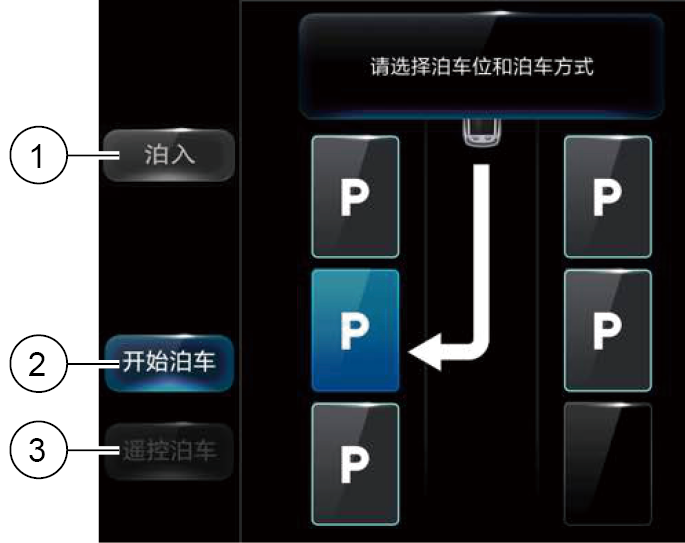
搜索到车位后,系统会提示车位信息,您可在此界面下进行泊车方式及车位的选择。
按钮①:可进行泊入和泊出的切换;
按钮②:选择并开始自动泊车模式;
按钮③:选择遥控泊车模式。
右侧区域提示已搜到的车位信息,可通过点击搜索到的车位进行选择。
泊车开始
选择完泊车方式及车位后,您可根据系统提示完成泊车操作,在泊车过程中,您需注意车辆周围情况,随时准备接管车辆,保障安全。
泊车完成
泊车完成后,系统会提示“泊车已完成”,您可接管车辆。
泊车暂停
泊车过程中,您可通过“暂停”按钮临时暂停泊车,暂停后可通过“继续”按钮继续完成泊车过程。如果泊车过程中发生暂停,您可根据系统提示信息进行判断是否继续泊车,如副驾车门打开导致的暂停,您可根据提示关闭车门继续完成泊车操作。
泊车取消
泊车过程中,您可通过“取消”按钮,取消本次泊车功能。如果泊车过程发生意外条件(如驾驶员干预方向盘)导致泊车取消,您需立刻接管车辆,以保障行车安全。
系统激活过程中,请根据系统提示进行泊车操作。
请以较慢车速搜索车位,当车速>35km/h时,系统将无法搜索车位。
搜索车位时,车身与障碍物距离应保持在0.5~1.8m。
系统所需有效平行车位长度≥5.8m;有效垂直车位宽度≥3m。
车辆保持标准胎压。
泊车暂停后可恢复泊车情况:
泊车过程按“暂停”按钮后,可通过“继续”按钮继续泊车;
泊车过程中非驾驶员侧车门或后背门未关闭,关闭车门后,可继续泊车;
泊车过程中安全带解开,重新系上安全带后可继续泊车;
泊车过程中检测到障碍物,待障碍物离开后可继续泊车。
不可恢复泊车情况如下,须重新进入自动泊车系统:
泊车过程中,驾驶员踩下加速踏板,泊车取消;
泊车过程中,驾驶员切换挡位,泊车取消;
泊车过程中,驾驶员干预方向盘,泊车取消;
泊车过程中,施加电子驻车制动,泊车取消;
泊车过程中,驾驶员侧车门或引擎盖打开,泊车取消;
泊车过程中,关联系统(如EPS、ESC、VCU等)不可用,泊车取消;
泊车过程中,暂停次数超过8次,泊车取消;
泊车过程中,按下“取消”按钮,泊车取消;
泊车过程中,按下自动泊车开关,泊车取消;
泊车过程中,车速过高,泊车取消。
故障显示
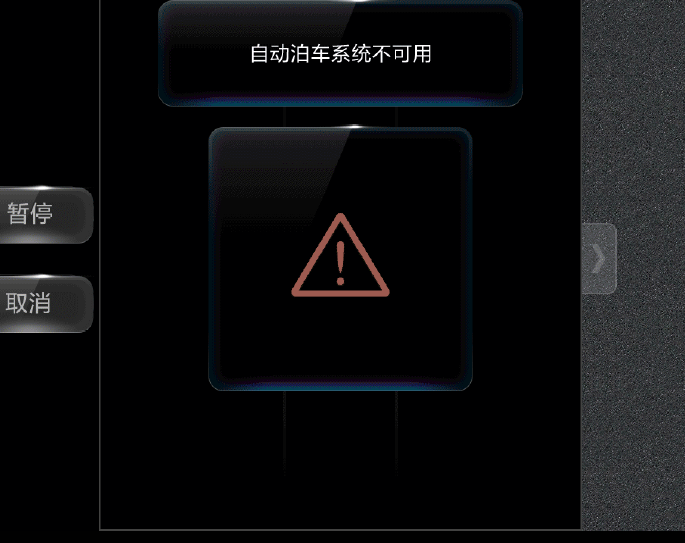
故障或中断解决方法:
车辆故障或中断后,正常情况按自动泊车按键可重新进入自动泊车系统。
部分情况,车辆需将车辆电源模式置于“OFF”挡后,重新将车辆电源模式置于“ON”挡。如车辆各系统冷却后重启,仍无法进入自动泊车系统,建议联系ARCFOX授权经销商进行检修。
自动泊车时,驾驶员应观察周围环境,避免部分障碍物系统无法识别而影响自动泊车安全。
自动泊车系统虽然能在泊车过程中为驾驶员提供帮助,但不能代替驾驶员进行泊车,因此驾驶员在应对此类操作时,切勿疏忽大意。
泊车开始后,注意不能接触方向盘,否则将退出全自动泊车。
系统可能无法识别并支持泊入墙角或拐角处的停车位。
您必须始终自行检查并确认系统搜索到的停车位安全且合适泊车,切勿依赖全自动泊车搜索合适的停车位。系统可能会在道路上、通道入口、灌木丛等地方误识别到停车位,需要您判定停车位合理性。全自动泊车功能无法判断搜索到的停车位是否合法,需要您确认停车位合法后再开始启动泊车程序。泊车期间,应时刻注意观察车辆周围环境,随时准备刹车以避让车辆、行人或物体。
全自动泊车作为一种驾驶辅助功能,无法应对所有交通、天气和道路状况。
您必须时刻关注交通状况及道路环境,并在确保安全的情况下自主决定是否使用全自动泊车。
在使用全自动泊车时,如发现交通状况、道路环境或车辆状况不适宜使用该功能,或存在其它不安全因素,您应随时准备接管车辆。您始终承担着安全泊车的最终责任,且需遵守现行交通法律法规。
泊车过程中,您作为行车安全负责人,需实时关注车辆周边环境,确保泊车过程的安全,并做好随时接管车辆的准备。尤其需要重点关注周围是否有行人、儿童、动物,和其它细、尖、矮、悬空等超声波传感器检测受限的障碍物。
系统只会显示可以根据自身能力泊入的停车位。是否可以泊入会根据环境变化,不只是依赖于停车位大小。如果泊车过程中发现车辆周围有突然出现的障碍物,请提前接管,因为系统可能无法及时刹停。
系统可能将地面上轮胎印迹、路面边界线误识别为车位,或无法识别不清晰的车位线,需要您判定停车位合理性。
系统并非总能识别到所有车位,例如:车位标线模糊、破损、混乱或被覆盖。
系统不支持弯道泊车。
系统有线车位识别能力,但是无法识别车位中有符号、文字、数字等信息。
包括但不限于以下情况,全自动泊车可能存在安全风险,无法正常操作:
道路为坡道。
易打滑的光滑地面
能见度差(因大雨、大雪、浓雾等造成)。
路缘的材质不是石头,或者无法检测到路沿。
一个或者多个超声波传感器或全景摄像头污损或受到遮挡(如污泥或者冰雪)。
天气条件(大雨、雪、雾、酷热或者极寒温度)干扰传感器工作。
狭窄停车位。
传感器受其它可产生超声波的电气设备或者装置的影响。
停车位内存在不能较好反射雷达传感器信号的物体、不在超声波传感器探测范围的物体。如尖细物体(树枝、柱子)、条状片状物体(木板)、柱状物体(锥桶或树)、低矮物体(地锁、杂草)及悬空物体(挂车)等。