自适应巡航*
α-Pilot自动辅助驾驶组件中,前视摄像头和雷达用来确定同车道前方是否有车辆。如果车辆前方畅通,自适应巡航系统将自动维持设定的行驶速度。如果检测到车辆,自适应巡航系统将根据需要降低车辆的车速,并根据驾驶员设定的跟车时距自动与前车保持安全时距,直至达到设定速度。驾驶员使用自适应巡航系统时,驾驶员仍需随时观察前方路况,并在必要时由驾驶员及时接管车辆、施加制动。
自适应巡航主要用于在高速公路、城市环路等干燥的直路上行驶。在城市街道上不应使用自适应巡航。
请驾驶员在使用自适应巡航系统时,务必观察前方路况,并随时准备采取纠正措施,否则可导致严重伤害甚至死亡。
自适应巡航是为了驾驶舒适性、便利性而设计,不属于碰撞警告或避撞系统。驾驶员有责任时刻保持警觉、掌控车辆,并安全驾驶,切勿依靠自适应巡航系统自动降低车辆速度。
自适应巡航不适用于行人和骑车人,切勿过度依靠自适应巡航降低车辆车速。
切勿在市内道路或路况多变的情况下使用自适应巡航。
请勿在有急弯的曲折道路上、结冰或湿滑路面上、恶劣天气(如雨、雪、雾、扬尘等天气)、不宜匀速行驶等情况下,使用自适应巡航系统。自适应巡航系统无法基于路况和驾驶条件调节行驶速度。
开启自适应巡航
自适应巡航开启前,首先需要保证智能控制显示屏车辆设置→α-Pilot界面下,“智能巡航系统”开关处于打开状态。

自适应巡航可在任意车速下(包括车辆静止时)启动。
激活时需要驾驶员保证车辆周边安全,距离前方车辆过近时,受传感器特性影响,可能无法正确识别目标。
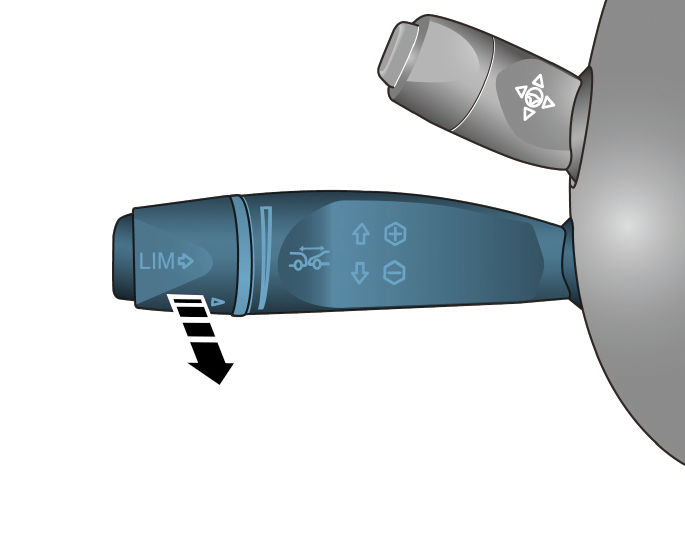
开启自适应巡航,需要将“巡航拨杆”向前(向驾驶员侧)拨动。如车速低于20km/h,则车辆会以20km/h进行巡航;如果车速高于20km/h,则车辆会以当前车速进行巡航。
向上或向下拨动自适应巡航会以之前退出的车速进行巡航,如本次车辆电源模式切换循环内开启过自适应巡航,则以上次设定的巡航车速进行巡航。
松开加速踏板,自适应巡航系统保持巡航速度。
组合仪表会显示已设置的巡航速度(以设定自适应巡航车速70km/h为例)。
可以设置的最低速度为20km/h,最高速度为150km/h。驾驶员有责任根据道路状况和车速限制以安全的车速巡航。
请勿过度依靠自适应巡航系统控制巡航速度。请驾驶员务必随时根据道路状况和适用的车速控制车辆。
巡航车速控制
系统未检测到车辆前方有车辆时,自适应巡航系统会根据驾驶员设定的巡航速度保持车辆匀速行驶。当系统检测到车辆前方有车辆时,自适应巡航将根据需要提高或降低车辆车速,以在设定速度之下保持选择的跟车距离。
在驶入和驶出弯道时,自适应巡航会自动调整巡航速度。
任何时候驾驶员都可以人为加速,在驾驶员松开加速踏板后,自适应巡航系统将继续按设定速度或者跟车速度行驶。
自适应巡航系统主动降低车辆车速以便与前车保持选定距离时,刹车灯会自动亮起,提醒后方其它车辆:您正在减速。此时,可能会发现制动踏板有轻微移动。当自适应巡航系统在给车辆加速时,加速踏板不会移动。
自适应巡航系统可能会由于制动能力有限和处于坡上而无法提供足够的速度控制。还可能会误判与前车之间距离。下坡时会增加行驶速度,从而导致车辆超过设定速度(也可能是道路限速)。切勿依赖自适应巡航系统对车辆进行充分减速来避免碰撞。行驶时务必观察路况,并准备根据需要采取正确措施。依赖自适应巡航系统避免碰撞可能会造成严重人身伤害甚至死亡。
自适应巡航系统偶尔会在不需要制动或您未打算制动时引起车辆制动。这可能是因跟随前车过近,或检测到相邻车道(特别是在弯道上)有车辆或物体等情况所导致。
自适应巡航系统无法探测到全部障碍物,尤其在车速高于60km/h的情况下,如果车辆或障碍物仅部分处于行驶车道中,或前车驶出您所在的车道后,车辆前方出现一辆静止或行驶缓慢的车辆或障碍物,则自适应巡航系统可能不会实施制动或减速。请务必注意前方路况,准备迅速采取修正措施。依赖自适应巡航系统避免碰撞可能会造成严重人身伤害甚至死亡。此外,自适应巡航系统可能会对不存在或不在所行驶车道上的车辆或物体做出反应,造成车辆不必要或不当减速。
在探测到弯道时,可能会出现自适应巡航系统降低车速的情况。
更改设定巡航速度
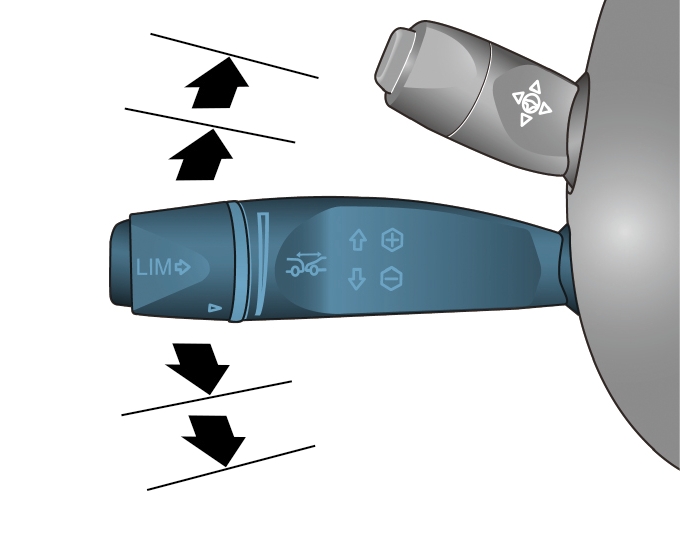
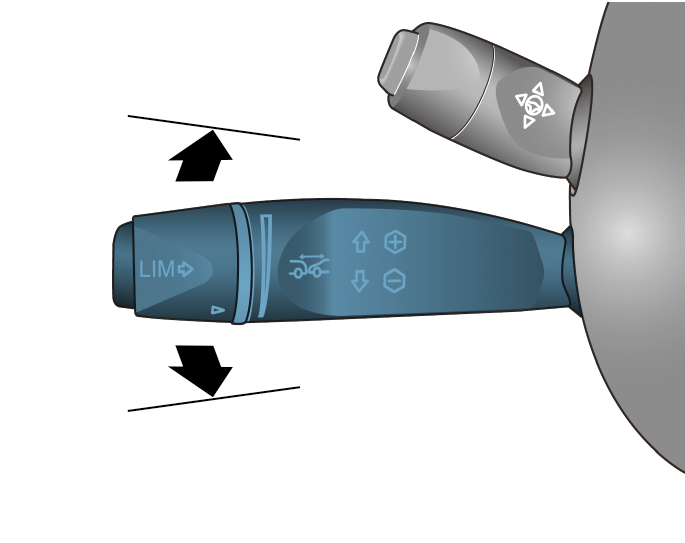
使用自适应巡航控制时,如需修改设定速度,可向上(增加)或向下(减少)拨动拨杆来增速或减速,直到显示所需的设定速度。“巡航拨杆”向上、向下均有两挡控制,向上或向下轻拨可按1km/h更改设定车速,向上、向下重拨可按5km/h更改设定车速。向上或向下轻拨并维持可按1km/h滚动设定车速,向上或向下重拨并维持可按5km/h设定车速。
在自适应巡航开启情况下,驾驶员也可以通过自行控制车辆加速到驾驶员想要巡航的车速,向前拨动拨杆,此时车辆会将目标车速调整到当前车速进行巡航。
假设车辆未检测到前方有行驶速度比设定速度低的车辆,车辆可能需要几秒钟时间才能达到新的巡航速度。
保持状态
跟随前车低速行驶时,自适应巡航系统仍然可用,可跟随前车直至停止。即使车辆完全停下来,当前方车辆再次行驶后,自适应巡航系统会跟随前车起步,并以设定速度恢复巡航状态。
但在以下情况下,自适应巡航系统需要驾驶员轻踩加速踏板或者向上向下拨动拨杆才能继续巡航。以下情况自适应巡航系统会进入保持状态:
车辆停驶时间超过15秒。
突然探测不到前方车辆。
调整巡航跟车时距
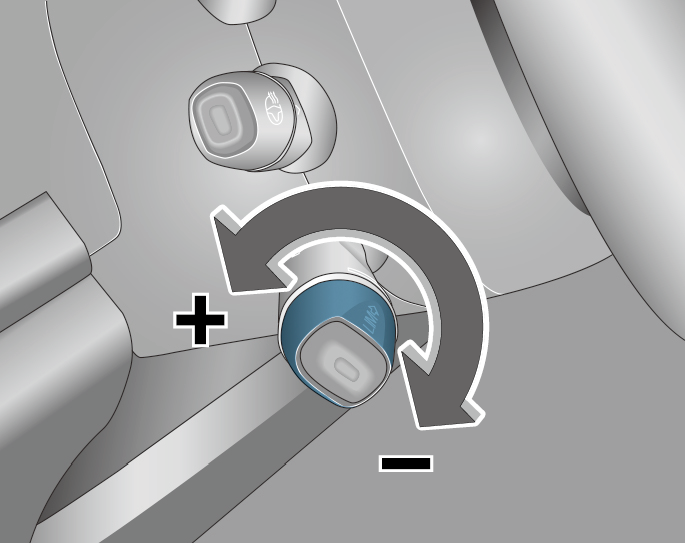
驾驶员可以旋转“巡航拨杆”顶端旋钮,设置车辆与前方车辆保持的跟车时距,从1至5依次加大跟车时距。逆时针旋转“巡航拨杆”顶端旋钮,增加跟车时距;顺时针旋转“巡航拨杆”顶端旋钮,减小跟车时距。
时距表示车辆从当前位置到达前车后保险杠位置所需的时间。
驾驶员有责任始终保持安全的跟车距离。切勿依赖自适应巡航系统保持准确、安全的跟车距离。
切勿依靠自适应巡航系统降低车辆车速以避免碰撞。请驾驶员务必观察前方路况,并随时准备采取纠正措施。
退出和恢复自适应巡航
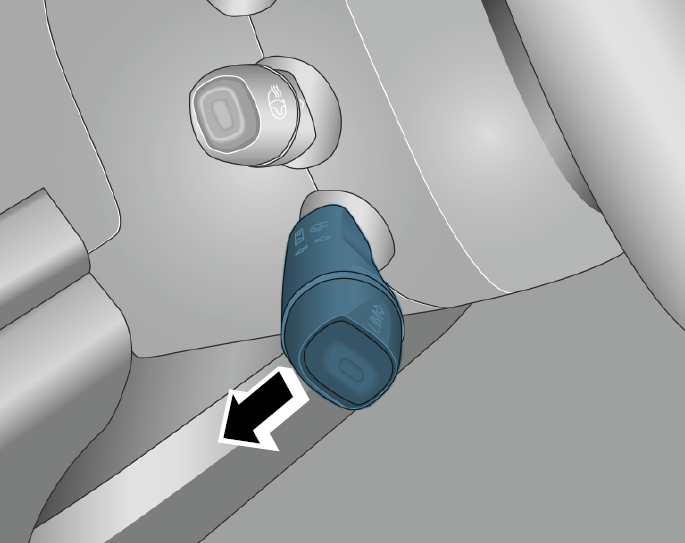
如需取消自适应巡航系统时,将“巡航拨杆”向后拨动或踩下制动踏板。
自适应巡航取消后,通过上拨或者下拨拨杆,可以按照之前设定的目标车速恢复巡航。
取消自适应巡航系统时,能量回收会使车辆制动、减速。减速方式与未开启自适应巡航控制时,驾驶员松开加速踏板减速相同。
下列情况时,自适应巡航系统可能会退出或无法使用:
驾驶员踩下制动踏板。
车辆速度超过150km/h。
处于非D档。
车门处于开启状态(包括前机舱盖、四门、后背门)。
驾驶员解开安全带。
因灰尘、泥、冰、雪、雾等干扰雷达或摄像头的正常探测路况。
ESC处于激活状态。
ESC系统关闭。
自适应巡航系统组件发生故障。
无法使用或退出自适应巡航系统时,车辆不再以设定速度稳定行驶,不再与前车保持规定的距离。
自适应巡航系统可能随时因未知原因意外退出。请驾驶员务必时刻观察前方路况,并准备随时采取适当的措施,驾驶员有责任始终控制车辆。
自动限速巡航
车辆处于自适应巡航或交通拥堵辅助与集成式巡航状态下,自动限速巡航系统接收交通标志识别功能提供的限速值,并结合驾驶员设定的巡航车速,对本车巡航车速进行限制:
如交通标志识别功能提供的限速值低于驾驶员设定的巡航车速,自动限速巡航系统将控制车辆按照交通标志识别功能提供的限速值进行巡航。
如交通标志识别功能提供的限速值高于驾驶员设定的巡航车速,车辆按照驾驶员设定的巡航车速进行巡航。
如交通标志识别功能提供的限速值低于40km/h或高于120km/h,车辆按照驾驶员设定的巡航车速进行巡航。
自动限速巡航系统可提高行车安全性与舒适性,降低因超速引起的交通违章风险。
车辆处于自动限速巡航状态下,驾驶员主动踩加速踏板,自动限速巡航仍保持激活状态,但不再限制车辆车速;待驾驶员松开加速踏板后,自动限速巡航接管车辆。
自适应巡航系统可能因为天气原因、弯道、限速标志被遮挡等原因失效。请勿过度依靠自动限速巡航系统控制巡航速度。请驾驶员务必随时根据道路状况和适当的车速控制车辆。
开启自动限速巡航
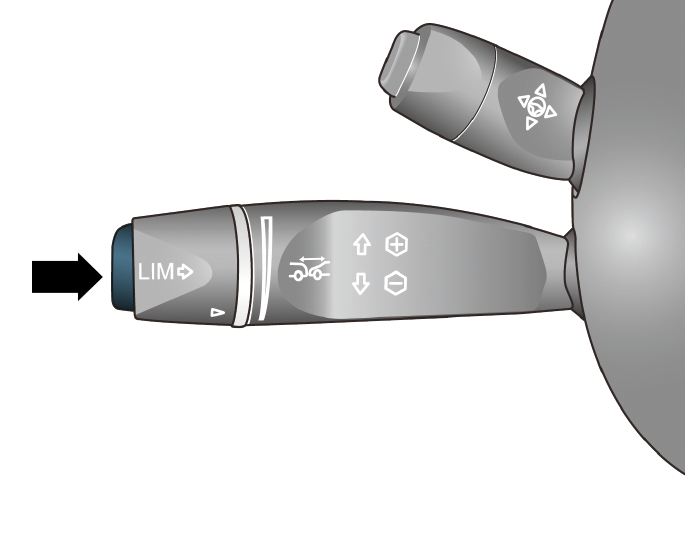
车辆处于自适应巡航状态下,驾驶员按下“巡航拨杆”顶端限速功能(LIM)按键一次,开启自动限速巡航系统。
关闭自动限速巡航
车辆处于自动限速巡航状态下,驾驶员按下“巡航拨杆”顶端限速功能(LIM)按键一次,关闭自动限速巡航系统。
限制条件
下列情况不宜使用自适应巡航系统:
能见度差(如雨、雪、雾、扬尘等天气)。
强光(如受直射的阳光或迎面而来的车辆前照灯灯光干扰等)。
污泥、冰雪等造成损坏或遮挡摄像头、雷达。
安装在车辆上的物体(如自行车架)造成干扰或阻碍。
将过多车漆或胶粘制品(如胶带、贴纸和橡胶涂料等)涂抹或粘贴到车辆上造成阻碍。
道路狭窄或蜿蜒曲折。
保险杠损坏或雷达未校准。
前风挡玻璃损坏或摄像头未校准。
其它产生同频干扰的设备造成影响。
温度过高(如摄像头长时间在日光照射下温度过高)或过低。
以上示例并未尽述影响自适应巡航系统正常工作的所有情况。